Distance - HC-SR04/RCW-0001/etc.¶
.
Plugin details¶
Type: Distance
Name: HC-SR04/RCW-0001
Status ESP32: NORMAL CLIMATE
Status ESP8266: NORMAL CLIMATE
GitHub: P013_HCSR04.ino
Maintainer: .
Used libraries: NewPing
Supported hardware¶
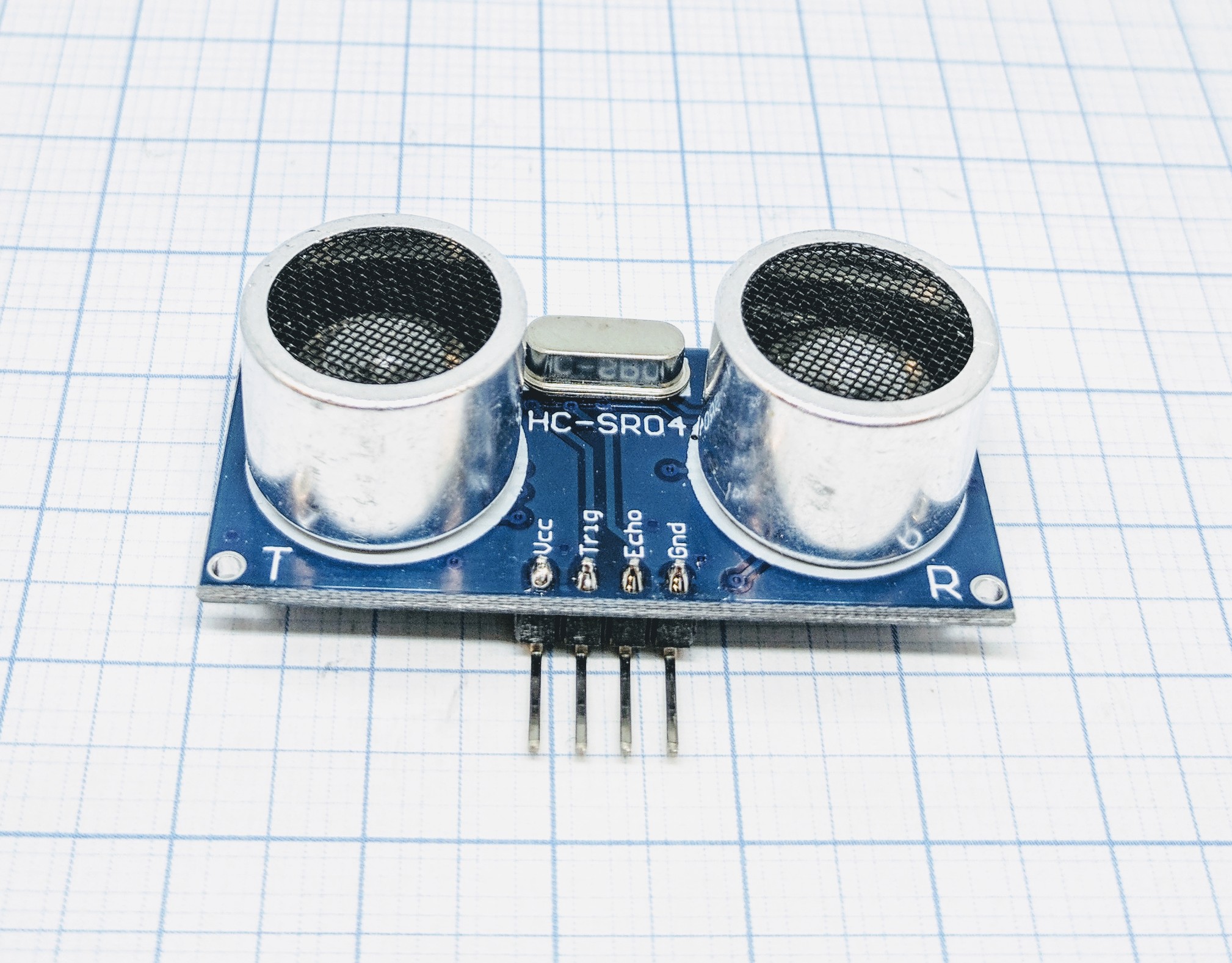
HC-SR04¶
RCW-0001¶

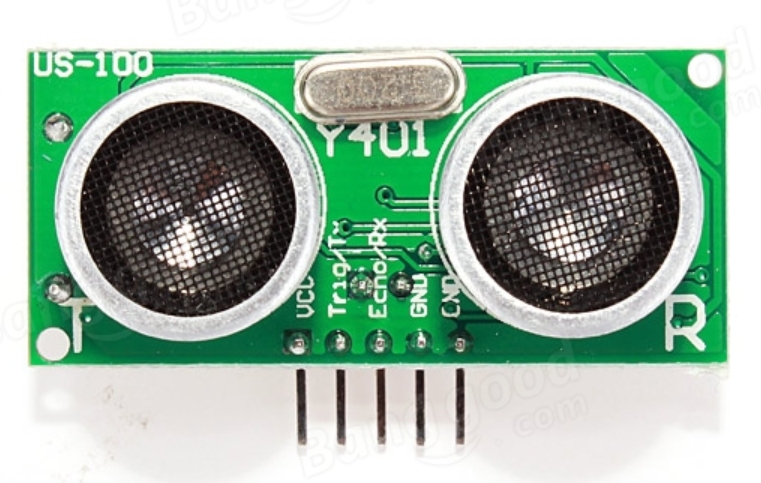
US-100¶
Introduction¶
The HC-SR04/RCW-0001/US-100 is an ultrasonic distance sensor. It’s able to indicate distances between 2 cm up to about 300 cm at a resolution of about 0.3 cm.
- Specifications:
Ultrasonic distance sensor
Measure angle: 30°
Ranging distance: 2cm - 300cm (some have reporting it work good up to 400 cm)
Wiring¶
The HC-SR04/RCW-0001/US-100 must be run on 5V. Running it with 3.3V will show very weak results or nothing at all.
ESP HC-SR04/RCW-0001/US-100
GPIO (X) <--> Trigger
GPIO (X) <--> Echo (voltage divider!)
Power
5.0V <--> VCC
GND <--> GND
Warning
Do not connect 5V directly to the ESP! Read more about Level converter.
Setup¶
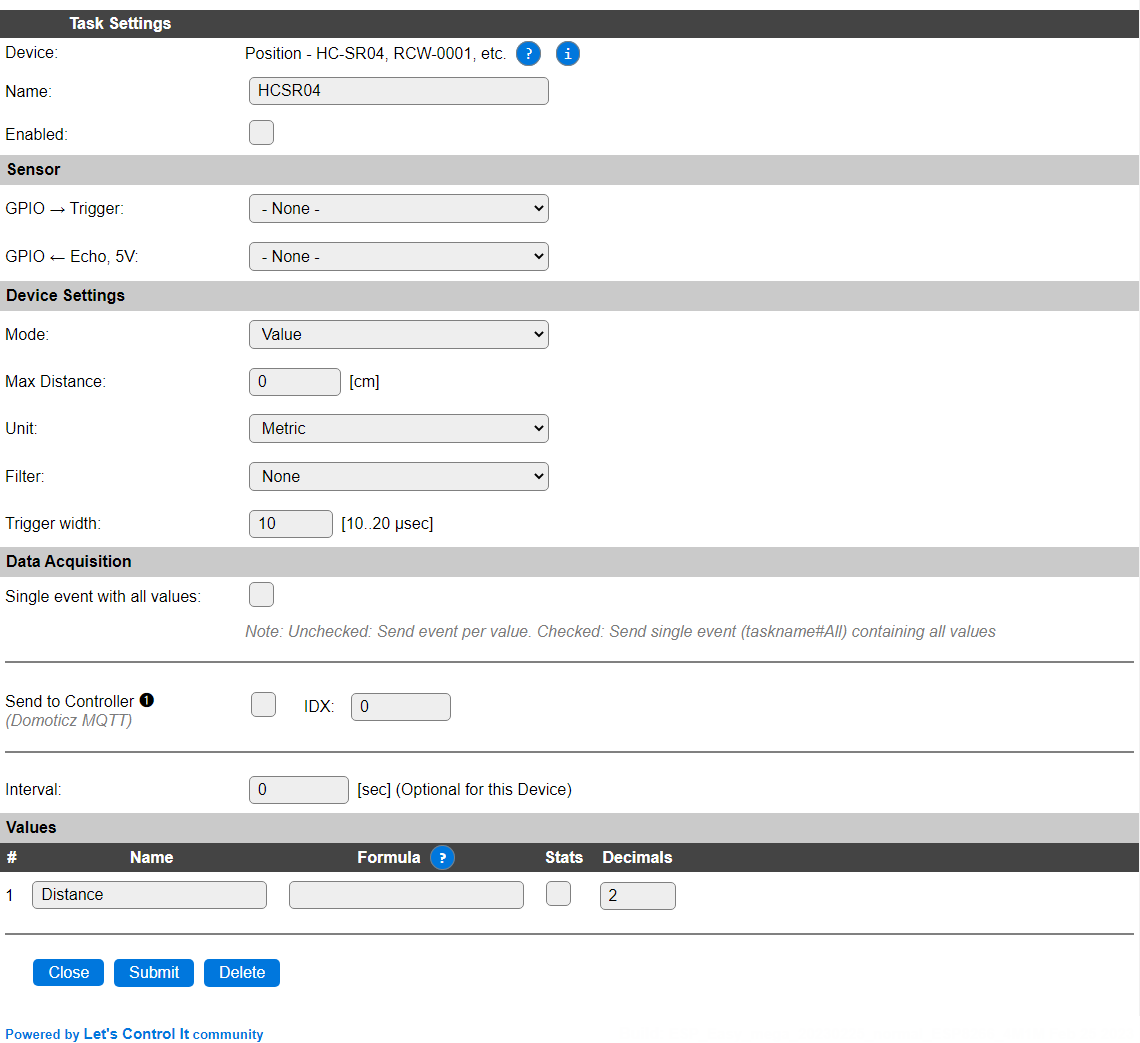
Task settings¶
Device: Name of plugin
Name: Name of the task (example name HCSR04), should not be empty.
Enable: Should the task be enabled or not
Sensor¶
GPIO –> Trigger: Set the GPIO to trigger the signal.
GPIO –> Echo, 5V: Set the GPIO to receive the echo signal, a voltage divider is needed.

Mode:
Valueis the most used setting, it will output the distance in centimeters. If you want the plugin to report a1or a0you use theStatesetting. State or Combined will open up a new field called “Threshold” which will allow you to enter a value. If the unit detects a value below the given threshold the task will be set to1, if the detected value is above the given threshold the task will be0. You should set the Interval to zero in case of using the state setting, just to make sure the action is triggered as soon as possible.A third option is to combine both the
ValueandStatemodes, to have both the distance and state values available. This mode is calledCombined.
Threshold: Set the distance that will trigger the event for the
StateorCombinedmode.Max distance: Set the max value the task will show. If the actual value is above the max distance the max distance will be displayed. Set to
0will disable the max distance setting. Max according to the specifications is300cm.Unit: You can show the output value as imperial without the need to do it using the formula function.
Filter: The signal might be a bit shaky for some applications, try to use the
Medianfiltering setting in that case.Trigger width: For hardware that doesn’t exactly follow the timing guidelines, it may be needed to extend the pulse delay somewhat to receive a usable echo. The default is 10 microsoconds, and can be increased in small steps to max. 20 microseconds.
Data Acquisition¶
This group of settings are standard available configuration items.
Single event with all values: When this setting is enabled, all available values will be sent in a single event
<TaskName>#All, with all values in order as arguments to the event.Show derived values: When checked, the Devices overview page, and the
/jsonendpoint (used for updating the Devices overview page) will include any Derived values as defined. See theTaskValueSetDerivedandTaskValueSetPresentationcommands.Event & Log derived values: When checked, the Derived values will be generated as Events, to be handled in Rules, and sent to logging devices like the Syslog server and/or SD-card logging.
(The derived values options are only available if String variables feature is included in the build.)
Send to Controller: Select the Controller(s) to send the Values to, either on a
TaskRuncommand applied to the task, or on an Interval time action.
Send to Controller is only visible when one or more Controllers are configured.
Depending on the controller capabilities, some configuration settings may be shown:

All configured Controllers are shown here, including the enabled or disabled state (multiple Controllers can be enabled, only a single MQTT Controller can be enabled at one time!).
For each controller the user can select wether the data should be sent on each Interval (or explicit TaskRun).
For the Domoticz controllers the value index (IDX) has to be configured.
For some controllers, like Home Assistant/openHAB, there are extra options available.
Group: This represents the group id to combine all values from multiple tasks into a single grouped-device during MQTT AutoDiscovery. Groups, by design, can span multiple ESPEasy devices, if desired, as long as the Task/Valuename combinations are unique. If a group should only combine Tasks from a single ESPEasy unit, the group id should be unique across multiple ESPEasy units. The group description, default Group <n>, can be adjusted in Home Assistant. If the Group value matches the current Unit nr, the Unit name,
%sysname%, is used instead of Group <nr>.Retained: For MQTT Controllers, this setting can be enabled to send the values for the current task with the Retain flag set. The Publish Retain flag in the Controller settings will override this by sending all task values with Retain flag enabled.
Send derived: This checkbox determines if any configured Derived values should also be sent to the controller (and included in the AutoDiscovery if that’s available and enabled).
Resend MQTT Discovery: When checked, will start a resend of the MQTT Discovery process for this task after a random delay, when Submit is clicked, so any changed settings will be updated in the MQTT broker. This setting is only available if the controller is enabled, the Auto Discovery feature is available and enabled for the controller. This setting is not stored.
Other controllers, like f.e. FHEM HTTP, do not support additional settings besides the checkbox to enable sending the data.
Interval: How often should the task publish its value (1..5 seconds is normal for the
ValueorCombinedsettings, 0 for theStatesetting).
Indicators (recommended settings)¶
Indicator |
Value Name |
Interval |
Decimals |
Extra information |
|---|---|---|---|---|
Distance |
Distance |
1 |
1 |
Used to get the actual distance that the sensor is measuring. |
State |
State |
0 |
0 |
Used to set the value high or low, just like a normal switch input device. |
Rules examples¶
on HCSR04#distance do
if %eventvalue1%<50 and %eventvalue1%>45
GPIO,14,1 //light up LED to show that you're at the correct position
else
GPIO,14,0
endif
endon
Where to buy¶
Store |
Link |
|---|---|
AliExpress |
|
Banggood |
|
eBay |
$ = affiliate links which will give us some money to keep this project running, thank you for using those.
Change log¶
Changed in version 2.0: …
added Major overhaul for 2.0 release.
Added in version 1.0: …
added Initial release version.